|
Addison Kalanther
I am a researcher in Berkeley Artificial Intelligence Research at UC Berkeley, advised by Professor Shankar Sastry. I work on reinforcement learning methods for multi-agent games. I graduated with my bachelor's degree in EECS from UC Berkeley in Winter 2024. I previously worked as a software engineer, interning at Salesforce, Lucid Software, and BeamNG.
|
|
ResearchI am generally interested in robot learning for non-cooperative environments. My current research is in learning adaptive policies for competitive multi-agent games. |
|
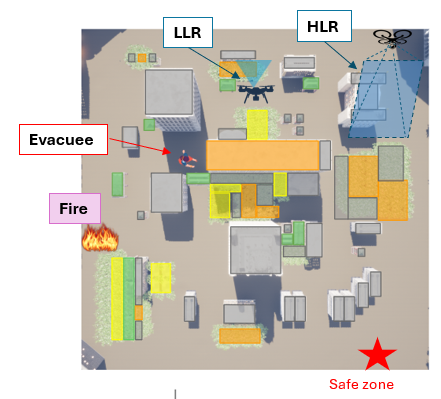
Coordinated Autonomous Drones for Human-Centered Fire Evacuation in Partially Observable Urban Environments
M. Mendoza, A. Kalanther, D. Bostwick, E. Stephan, C. Maheshwari, S. Sastry IEEE Global Humanitarian Technology Conference (GHTC), 2025 project page / arXiv We train a team of heterogeneous UAVs to coordinate and guide human evacuees to safety during urban fires. By modeling the problem as a POMDP and using PPO with recurrent policies, our drones can locate and assist panicked evacuees under partial observability. |
|
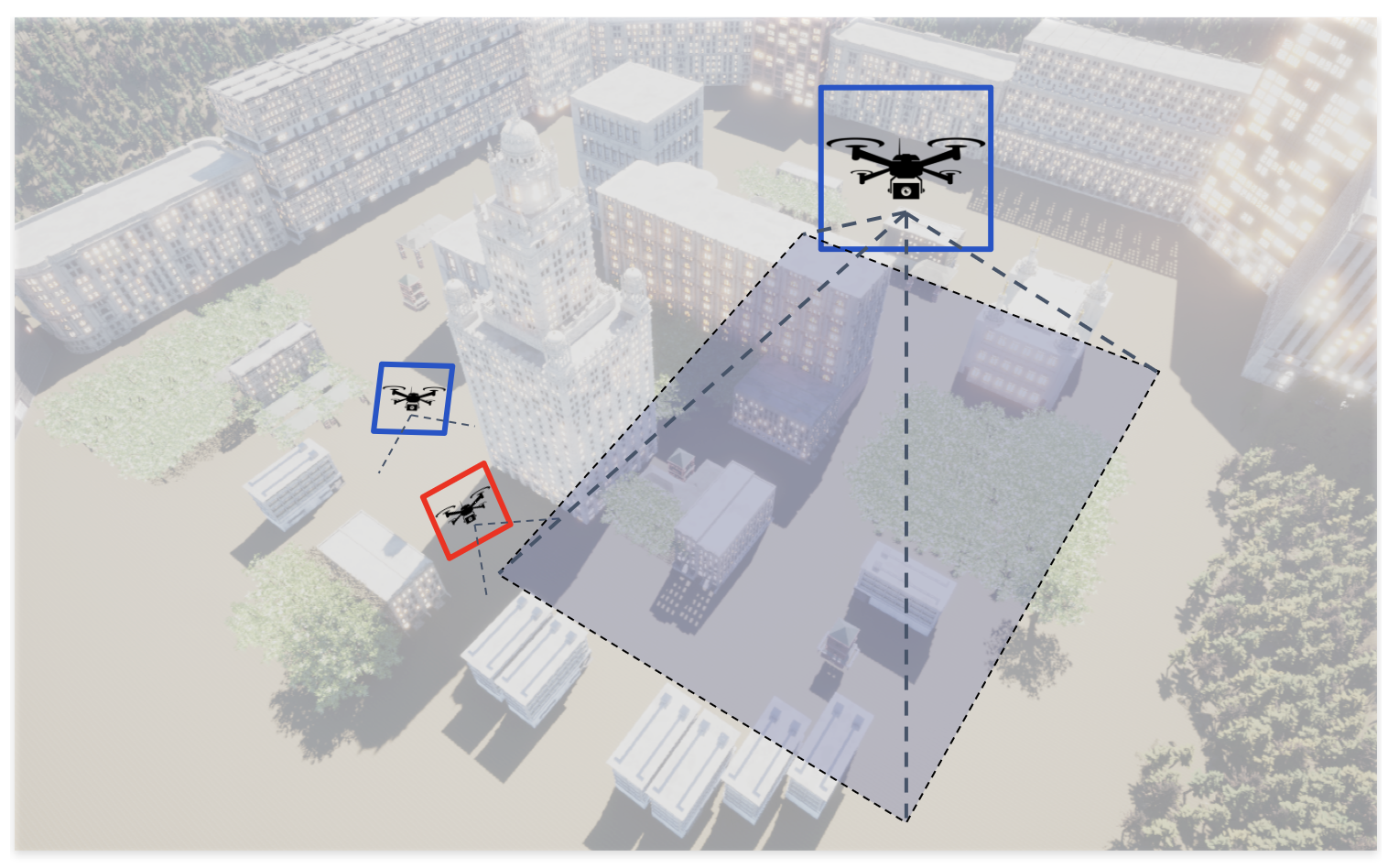
Evader-Agnostic Team-Based Pursuit Strategies in Partially-Observable Environments
A. Kalanther, D. Bostwick, C. Maheshwari, S. Sastry Workshop on Multi-Agent Systems, Robotics: Science and Systems (RSS), 2025 project page / arXiv We develop a neuro-symbolic algorithm for multi-UAV pursuit-evasion games where the pursuer team has no prior knowledge of the evader's behavior. Using deep RL to train adversarial policies with bounded rationality, our method enables robust pursuit in partially-observable urban environments. |
|
Design and source code from Jon Barron's website. |