|
Addison Kalanther
I am a researcher in Berkeley Artificial Intelligence Research at UC Berkeley, advised by Professor Shankar Sastry. I work on reinforcement learning methods for multi-agent games with unknown adversaries. I graduated with my bachelor's degree in EECS from UC Berkeley in Winter 2024. I previously worked as a software engineer, interning at Salesforce, Lucid Software, and BeamNG.
|
|
ResearchI am interested in robot learning for non-cooperative environments. |
|
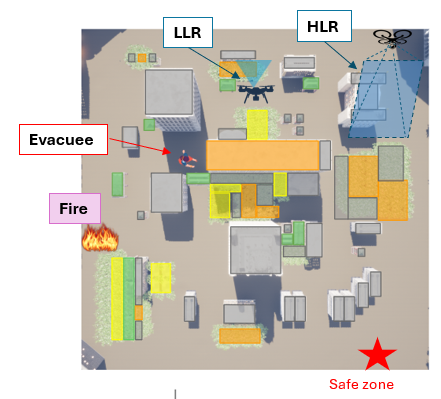
Coordinated Autonomous Drones for Human-Centered Fire Evacuation in Partially Observable Urban Environments
M. Mendoza, A. Kalanther, D. Bostwick, E. Stephan, C. Maheshwari, S. Sastry IEEE Global Humanitarian Technology Conference (GHTC), 2025 project page / arXiv We train a team of heterogeneous UAVs to coordinate and guide human evacuees to safety in an urban fire scenario. We model the problem as a POMDP where humans have unknown panicked behavior and use reinforcement learning to learn adaptive policies for guiding evacuees. |
|
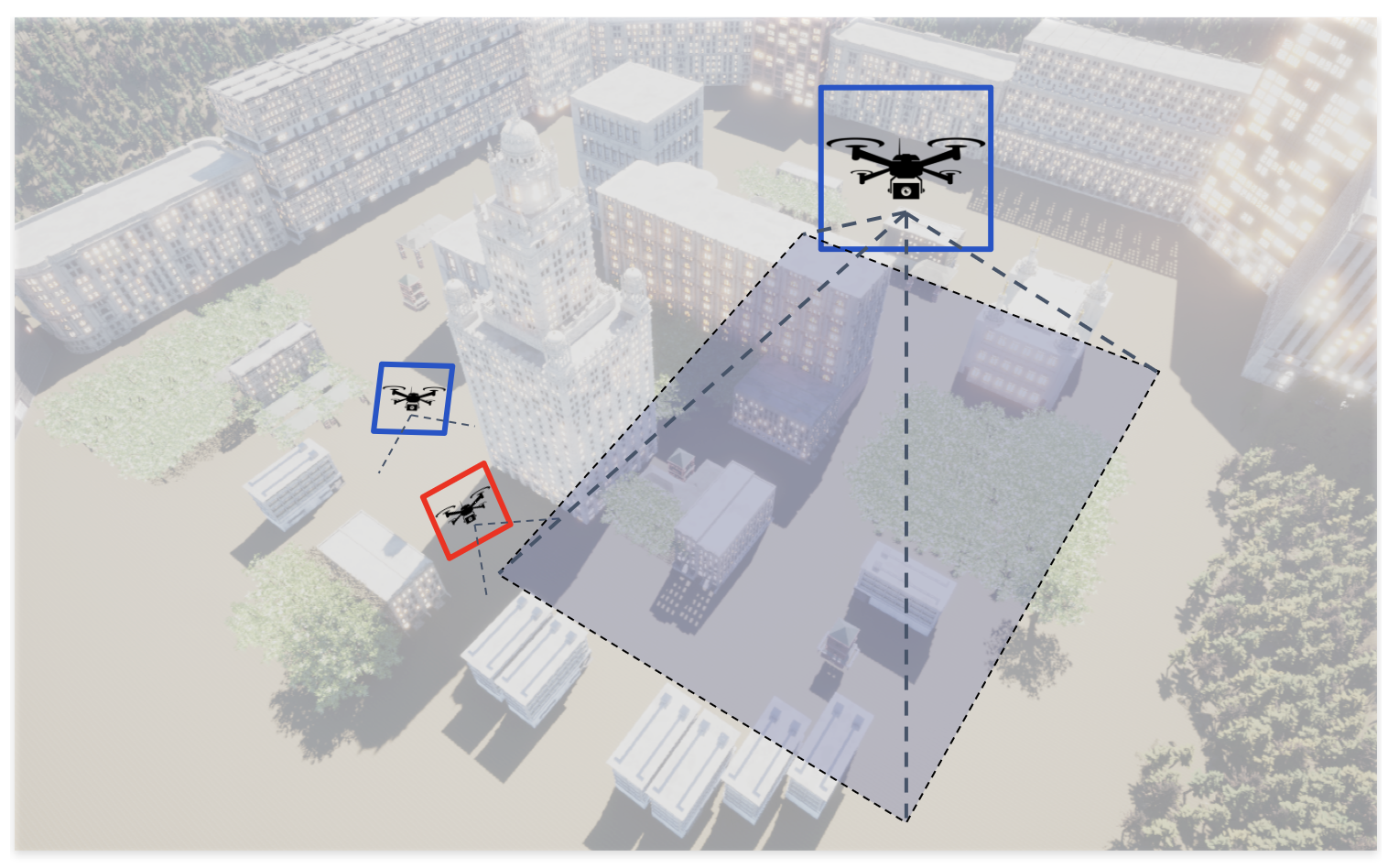
Evader-Agnostic Team-Based Pursuit Strategies in Partially-Observable Environments
A. Kalanther, D. Bostwick, C. Maheshwari, S. Sastry Workshop on Multi-Agent Systems, Robotics: Science and Systems (RSS), 2025 project page / arXiv We develop a sample-efficient adaptation strategy to handle unknown adversaries in a partially-observable pursuit-evasion game. We use a bounded rationality model to collect diverse and sophisticated evader policies and train an adaptive policy for the pursuer team using deep RL. |
|
Design and source code from Jon Barron's website. |